Implementing Actions
What Are Actions?
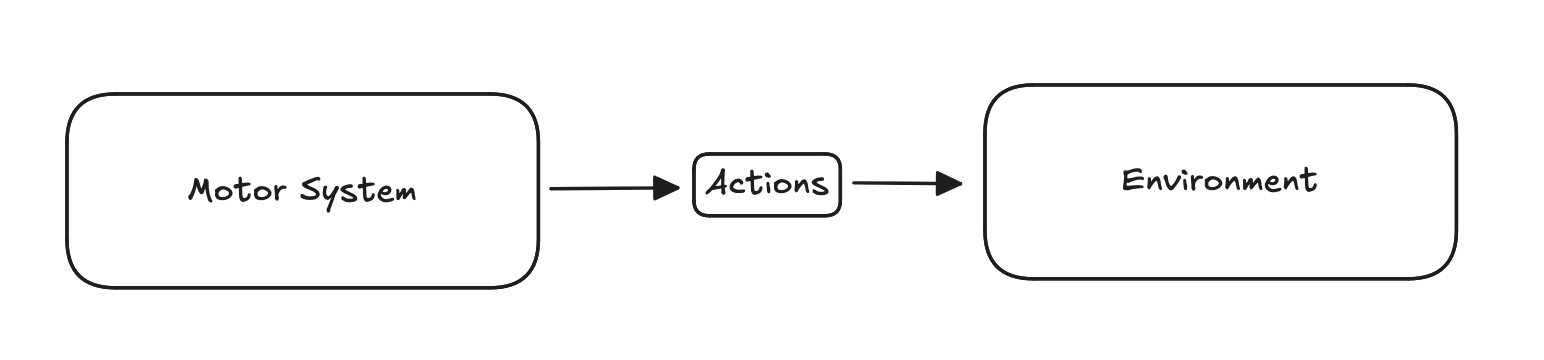
Actions are how Monty moves Agents in its Environment. Monty's Motor System outputs Actions, which are then actuated within the Environment. An Agent is what Monty calls its end effectors, which carry out actions in the environment, physically or in simulation (like a robotic arm or a camera), or virtually (like a web browser navigating the Internet).
Actions are coupled to what can be actuated in the Environment. For example, if a simple robot can only go forward and backward, then the meaningful actions for that robot are restricted to going forward and backward. The robot environment would be unable to actuate a Jump action.
With that in mind, before creating a new Action, consider what can be actuated in the Environment.
Action Lifecycle
At a high level, Actions are created by the Motor System and actuated by the Environment.
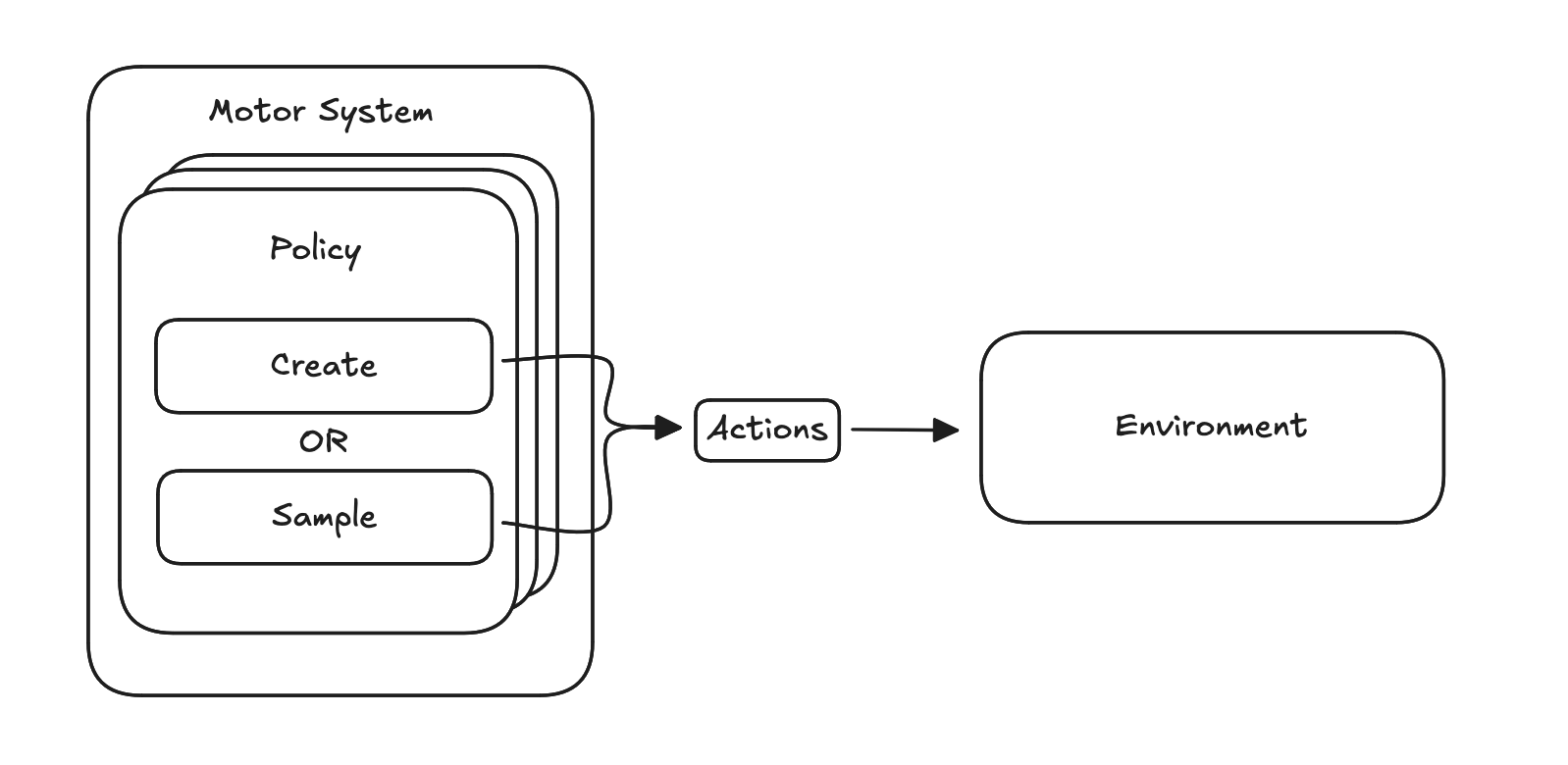
Within the Motor System, Policies either explicitly choose specific Actions by creating them directly (e.g., create MoveForward), or sample random Actions from a pool of actions available (e.g., sample MoveForward from the action space {MoveForward, MoveBack}).
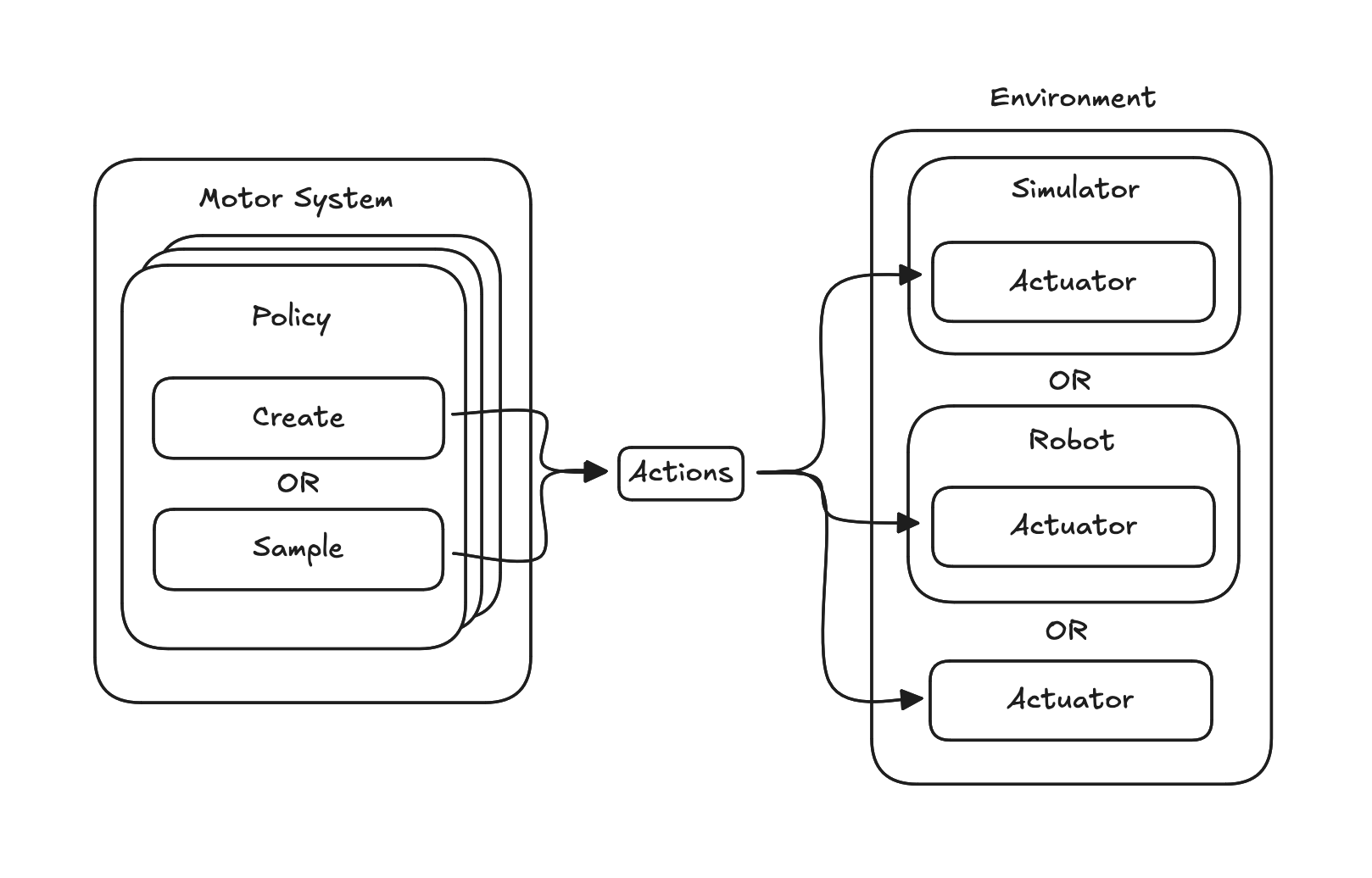
Within the Environment, the Actions are actuated either within a simulator, by a robot, or directly.
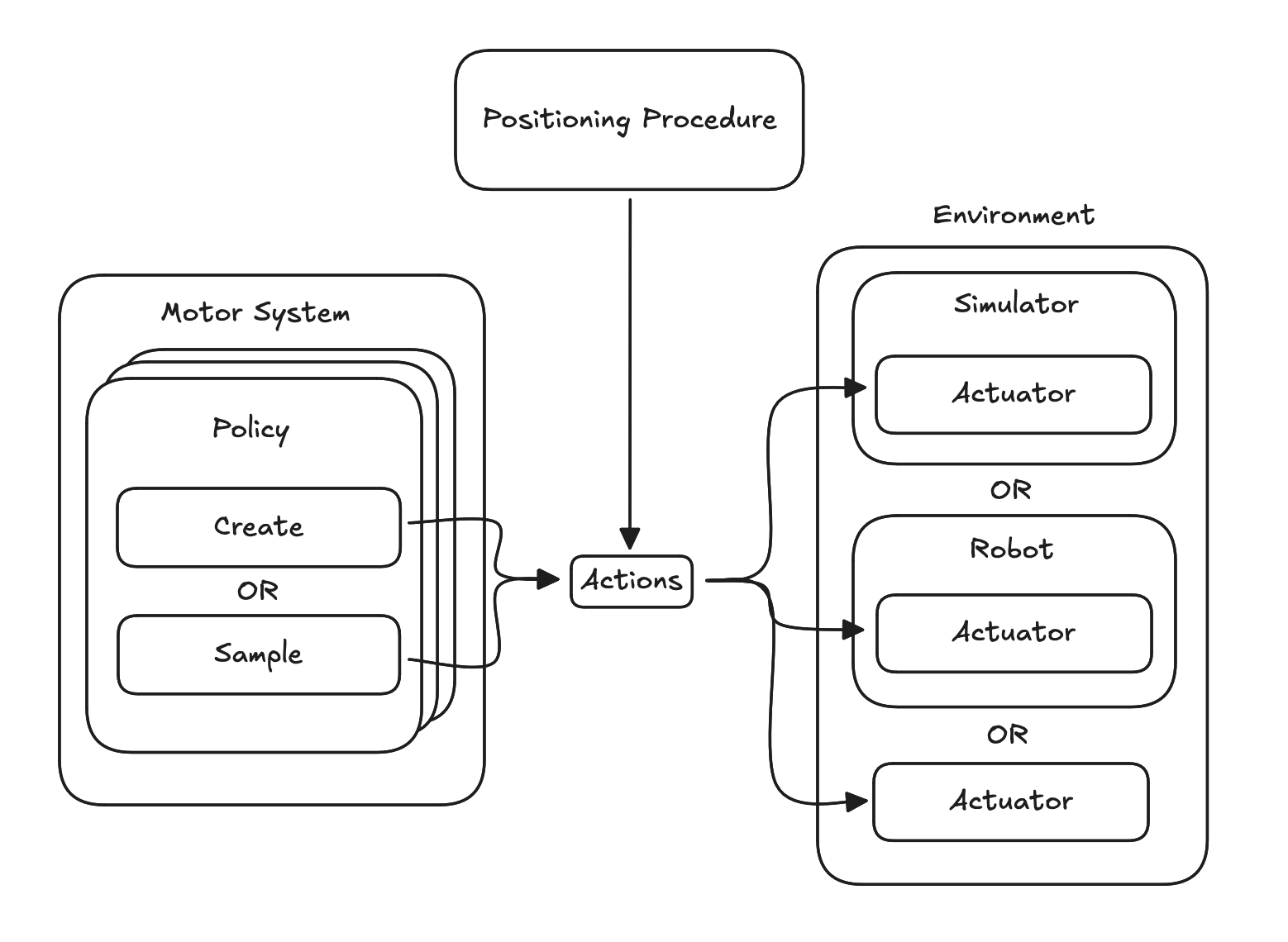
Additionally, within an experimental framework, a Positioning Procedure can generate Actions before starting the experiment. This is analogous to an experimenter moving Monty into a starting position. The Positioning Procedure can use privileged information such as labels, ground truth object models, or task instructions, and is independent of Monty and the models learned in its learning modules.
Creating Actions
Once you have a new Action in mind, to create it, you'll need to explicitly implement the Action protocol:
class Jump(Action):
def __init__(self, agent_id: AgentID, how_high: float) -> None:
super().__init__(agent_id=agent_id)
self.how_high = how_high
If at any point this action will be read from a file, then be sure to update the ActionJSONDecoder as well:
class ActionJSONDecoder(JSONDecoder):
# ...
def object_hook(self, obj: dict[str, Any]) -> Any:
# ...
elif action == Jump.action_name():
return Jump(
agent_id=obj["agent_id"]
how_high=obj["how_high"]
)
# ...
With the above in place, the Motor System can now create the Action as needed.
Sampling Actions
Action samplers can be used to randomly sample actions from a predefined action space. You can use different samplers to implement different sampling strategies. For example, one sampler could always return the same action. Another sampler could return predetermined sequence of actions. Another sampler could randomly pick an action. Additionally, samplers can parameterize the actions differently. One sampler could configure all movement actions with the same distance to move. Another sampler could randomly sample the specific distance to move. For examples of samplers currently used by Monty, see src/tbp/monty/frameworks/actions/action_samplers.py.
For the Motor System to be able to sample the Action with the help of a sampler, you will need to include a sample method and declare an action-specific sampler protocol:
class JumpActionSampler(Protocol):
def sample_jump(self, agent_id: AgentID) -> Jump: ...
class Jump(Action):
@staticmethod
def sample(agent_id: AgentID, sampler: JumpActionSampler) -> Jump:
return sampler.sample_jump(agent_id)
def __init__(self, agent_id: AgentID, how_high: float) -> None:
super().__init__(agent_id=agent_id)
self.how_high = how_high
This prepares the Action to be used in a sampler.
The sampler itself will subclass ActionSampler and implement the requisite protocol:
class MyConstantSampler(ActionSampler):
def __init__(
self,
actions: list[type[Action]] | None = None,
height: float = 1.8,
rng: Generator | None = None
) -> None:
super().__init__(actions=actions, rng=rng)
self.height = 1.8
def sample_jump(self, agent_id: AgentID) -> Jump:
return Jump(agent_id=agent_id, how_high=self.height)
The sampler then will be used along the lines of:
sampler = MyConstantSampler(actions=[Jump])
action = sampler.sample("agent_0")
Actuating Actions
For an Action to take effect within an Environment, it needs to be actuated. Include the act method and declare an action-specific actuator protocol:
class JumpActuator(Protocol):
def actuate_jump(self, action: Jump) -> None: ...
class Jump(Action):
def __init__(self, agent_id: AgentID, how_high: float) -> None:
super().__init__(agent_id=agent_id)
self.how_high = how_high
def act(self, actuator: JumpActuator) -> None:
actuator.actuate_jump(self)
The actuator itself will be specific to the Environment and the simulator, robot, or otherwise. However, in general, it will implement the actuator protocol:
class MyActuator:
def actuate_jump(self, action: Jump) -> None:
# custom code to make Jump happen in your system
pass
The Environment, simulator, or robot will invoke the actuator by calling the Action's act method:
SomeSimulatorAction = Union[Jump, Tumble] # Actions the simulator can actuate
class SomeSimulator:
def step(self, actions: Sequence[SomeSimulatorAction]) -> tuple[Observations, ProprioceptiveState]
# ...
for action in actions:
action.act(self.actuator)
# ...
You could implement the actuator as a Mixin, in that case it would look more like:
class SomeSimulator(MyActuator):
def step(self, actions: Sequence[SomeSimulatorAction]) -> tuple[Observations, ProprioceptiveState]
# ...
for action in actions:
action.act(self)
# ...
For an example of an actuator, see src/tbp/monty/simulators/habitat/simulator.py
Help Us Make This Page Better
All our docs are open-source. If something is wrong or unclear, submit a PR to fix it!
Updated 5 months ago